My Projects
A1-RealViz
A real-time visualization and control tool for the Unitree A1 robot, featuring:
- Interactive joint-control sliders to command the robot’s joints.
- Real-time plots of joint positions & foot forces.
- Synchronized Gazebo and RViz views.
Grid Optimization Puzzle Game
A grid-based puzzle game implemented in Python using Pygame
- In this game, multiple agents navigate a 5x5 grid, overcome obstacles, and perform actions (such as acquiring colors and opening doors) to reach designated target positions.
- The project demonstrates the use of classical search and planning algorithms—BFS, DFS, and A*—to automatically solve the puzzle, as well as a random controller for baseline testing.
Steel Defect Detection
Implements a U-Net semantic segmentation model to spot defects on steel surfaces:
- UNet for pixel-level defect masks.
- Real-time inference pipeline.
- Evaluated via Dice coefficient & IoU metrics.
EEG Signal Classification
ML pipeline to classify EEG signals into hand gestures, enabling intuitive robot control:
- Preprocessed EEG data (noise removal, feature extraction).
- Designed & trained classification models.
- Validated accuracy & robustness on experimental datasets.
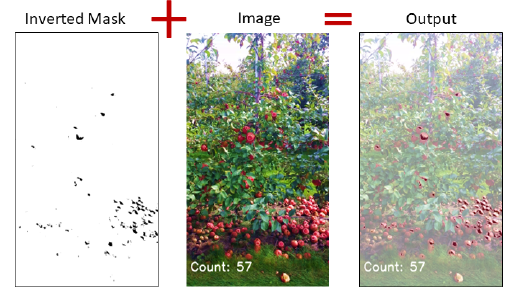
Apple Counting Using Machine Learning
Compared two methods for counting apples in an orchard:
- YOLOv5s object detection.
- Blob detection on HSV-masked images.
- Benchmarked accuracy and speed.
Socially & Physically Assistive Robots in HRI
Analysis of assistive robots’ impact on human-robot interaction:
- Pepper assisting with daily tasks.
- TurtleBot3 delivering medication on schedule.
- Evaluated user satisfaction & effectiveness.
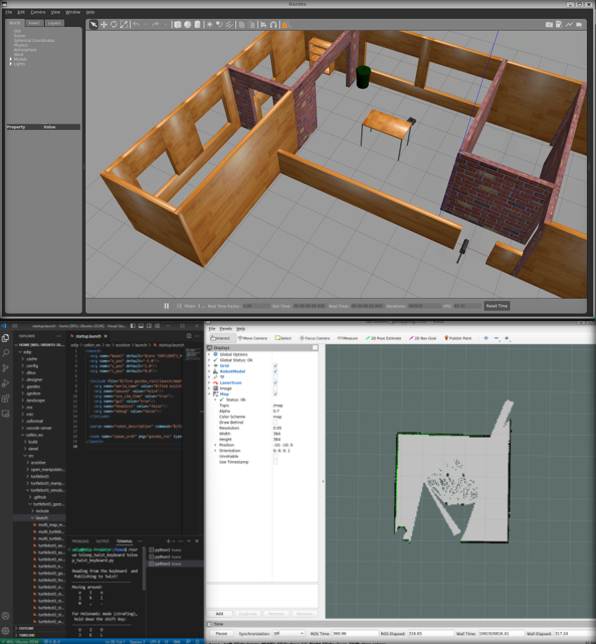
Path Traversing
Autonomous mobile robot surveying an underwater pipeline to find breakages and return:
- Based on Pololu 3Pi+ platform.
- Advanced navigation in challenging environments.
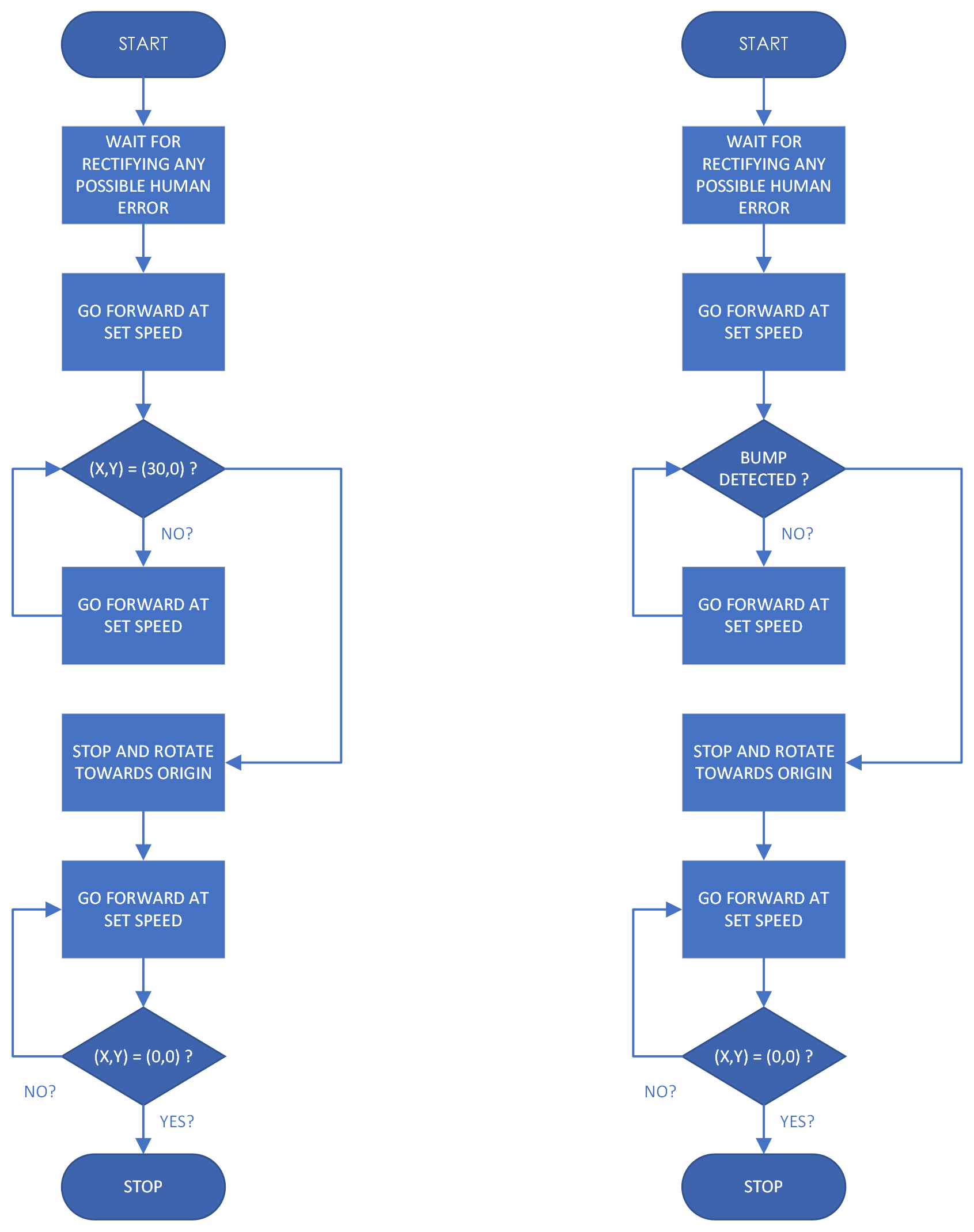
Investigating Odometry Errors
Study on collision-induced odometry errors using accelerometer & encoder data:
- Designed experiments with enhanced robot platform.
- Characterized and mitigated error sources.
Nao as a Meditation Assistant
User study comparing NAO robot-guided meditation vs. smartphone video:
- Measured emotional state & stress levels.
- Analyzed impact of physical robot presence.